
About Me
Hi, I'm Jesty Jacob, a Computer Science student at the United Arab Emirates University, with a minor in Artificial Intelligence and a strong passion for building things that work in the real world. My academic and research journey has focused on computer vision, robotics, and machine learning, where I've been fortunate to lead and contribute to projects that blur the line between theory and application.
My journey in technology has led me to work on exciting projects in robotics, computer vision, and machine learning. I'm currently working on a research project to enhance Artificial Potential Field (APF) navigation algorithms for mobile robots,specifically addressing the narrow path challenge using LiDAR-based perception and real-time control systems. This is also the core of my senior graduation project, and one of several experiences that has taught me how unpredictable, exciting, and humbling real-world robotics can be.
I also co-led a research study on solar panel fault classification using CNNs, which is under review for publication. Along the way, I've built systems for 3D GIS visualization, sentiment analysis on Steam game reviews, and even competed in (and won) an autonomous racing competition at my university.
What ties everything together is my drive to solve problems that matter, whether that's through research, rapid prototyping, or creative collaboration. I'm always on the lookout for opportunities to learn, connect, and contribute, especially in spaces where AI meets real-world complexity.
Experience
Research Assistant - APF Navigation
Aug 2024 - PresentUnited Arab Emirates University
Leading development of novel APF algorithms for mobile robot navigation, focusing on narrow path challenges with LiDAR-based perception and deep learning integration. Senior graduation project.
Research Assistant - Solar Panel Fault Detection
Jan 2024 - PresentUnited Arab Emirates University
Conducting UAV-based CNN image processing research for photovoltaic power plant fault detection. Optimized deep learning models achieving ~93% accuracy, reducing manual inspection time by 60%. Publishing August 2025.
Software Engineering Intern
Nov 2023 - Nov 2024QualNotes, Sweden
Designed and developed Mapbox-based 3D data visualization tool. Implemented efficient data fetching algorithms reducing API response times by 50%. Worked directly with co-founder translating ideas into scalable features.
AI Trainee
Sep 2024 - Nov 2024Samsung Innovation Campus, Abu Dhabi
Built AI-driven sentiment analysis tool using fine-tuned BERT and RoBERTa models, achieving 92% accuracy on 500,000 reviews. Automated data preprocessing improving efficiency by 30%. Deployed Streamlit dashboard for real-time analysis.
Skills
AI & Machine Learning
- Computer Vision
- Natural Language Processing
- BERT/RoBERTa Models
- Predictive Modeling
- Deep Learning & Neural Networks
Robotics & Systems
- ROS (Robot Operating System)
- APF Path Planning
- SLAM
- UAV Systems
- Deep Reinforcement Learning
Programming
- Python
- Java & C
- JavaScript (React, SvelteKit)
- HTML/CSS
- Data Structures & Algorithms
Projects

Autonomous Security System - IDEX 2025
AI-powered autonomous security system using the Unitree GO1 quadruped robot with real-time facial recognition and threat detection. Achieved ~96% accuracy and presented at IDEX 2025, representing UAEU.
AI Sentiment Analysis Tool
AI-driven sentiment analysis tool using fine-tuned BERT and RoBERTa models, achieving 92% accuracy on 500,000 Steam game reviews. Developed interactive Streamlit dashboard for real-time analysis.
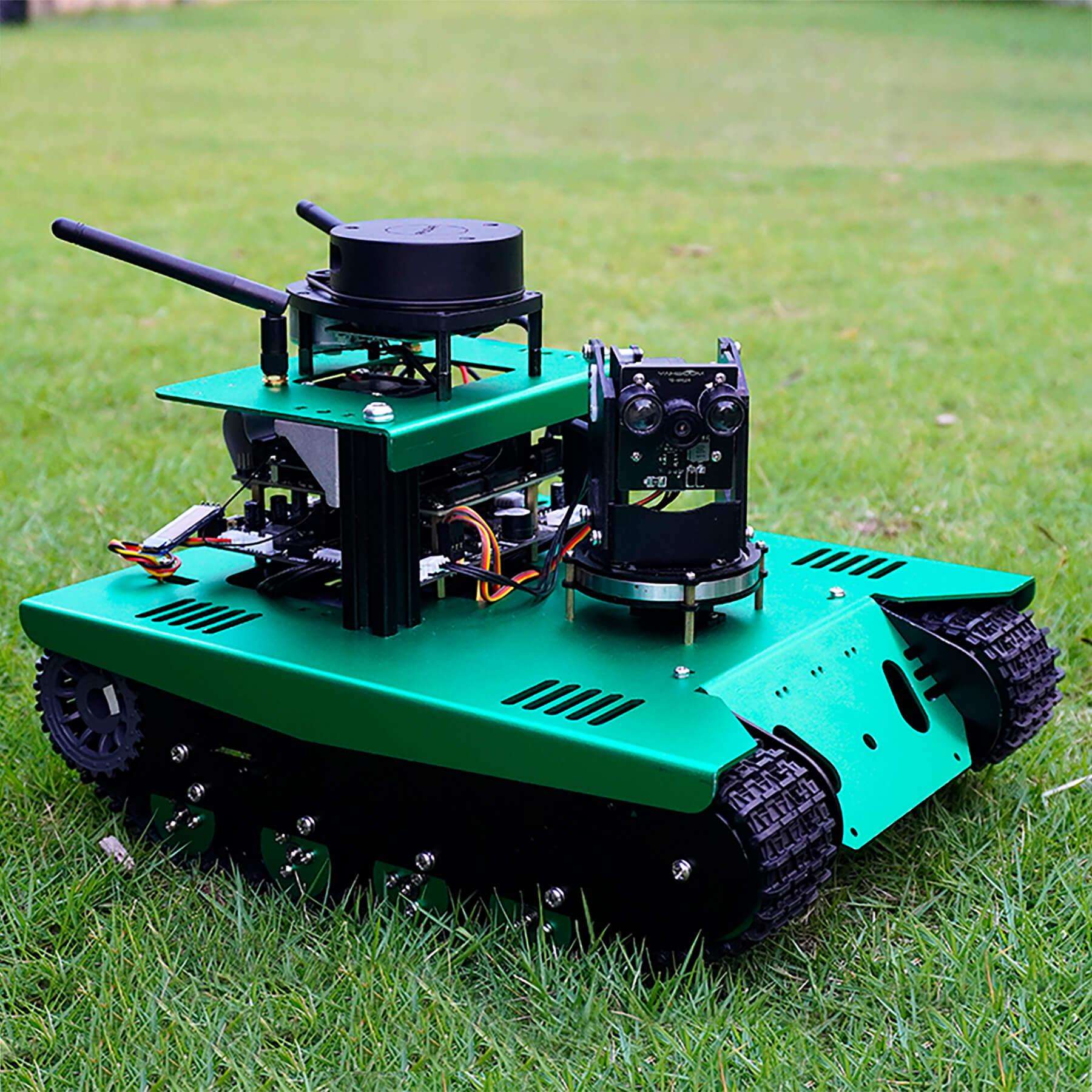
APF Navigation Research
Leading research on enhancing Artificial Potential Field algorithms for mobile robot navigation, addressing narrow path challenges with LiDAR-based perception and deep learning integration. Senior graduation project.

UAV Solar Panel Fault Detection
UAV-based CNN image processing for photovoltaic power plant fault detection. Optimized deep learning models (ResNet, EfficientNet) achieving ~93% accuracy and reducing manual inspection time by 60%. Publishing August 2025.

Autonomous Car Racing
Won 1st place in the Autonomous Car Racing Competition at UAEU, implementing advanced control algorithms and computer vision for autonomous navigation and racing optimization.

3D Data Visualization Tool - QualNotes
Mapbox-based 3D data visualization tool developed during internship at QualNotes, Sweden. Implemented efficient data fetching algorithms that reduced API response times by 50%.